4.3.2.4 Delay Correction
One of the problems with PEC is that during playback, the corrections are applied a
certain amount of time after the error has occurred. This is caused either by the reaction
time of the human as he or she guides manually, or by the integration time of an
autoguider during the training run. In other words, during a training run, the correction
doesn' t get recorded until after the error has occurred and is noticed by either the person
guiding or the autoguider. Not only is the correction applied after the error occurs, but
with autoguiding CCD cameras, a problem might arise during playback as a result of two
control circuits working against each other because of the described time difference. The
autoguider would see the error and attempt to correct it at the same time that the PEC is
also attempting to correct it, resulting in over correction.
To overcome this problem, Gemini allows advancing the replay of the corrections a
certain amount of time. This allows the PEC to anticipate the error rather than react to it.
The amount of shift needed to remove the time delay depends upon the setup used during
the training run. Manual guiding reaction delays depend on the telescope' s magnification
and partially on the seeing, while autoguiding delays depend on the integration time used.
The amount of shift specified in this command is the number of correction steps. Gemini
systems other than those on the Titan 50 are geared for 6400 steps per revolution of the
worm. So, the 4 minute worm period on a G 11, HGM 200 and MI 250 gives 0.5625
arcsec/step, the 5.33 minute worm on the HGM Titan gives 0.75 arcsec/step, and the 8
minute worm on the GM 8 and CI 700 gives 1.13 arcsec/step. The Titan 50 mount is
geared for 12800 steps per revolution, so its 5.33 minute worm period gives 0.375
arcsec/step. You can specify between 0 and 255 steps to shift the PEC playback. Setting
the shift to 0 disables the function. As an example, on a G 11 with a 4 minute worm
period, there are about 6400/(4 * 60) = 26.67 steps/second for sidereal tracking. This
means that shifting the PEC playback by 27 steps advances the corrections by about one
second.
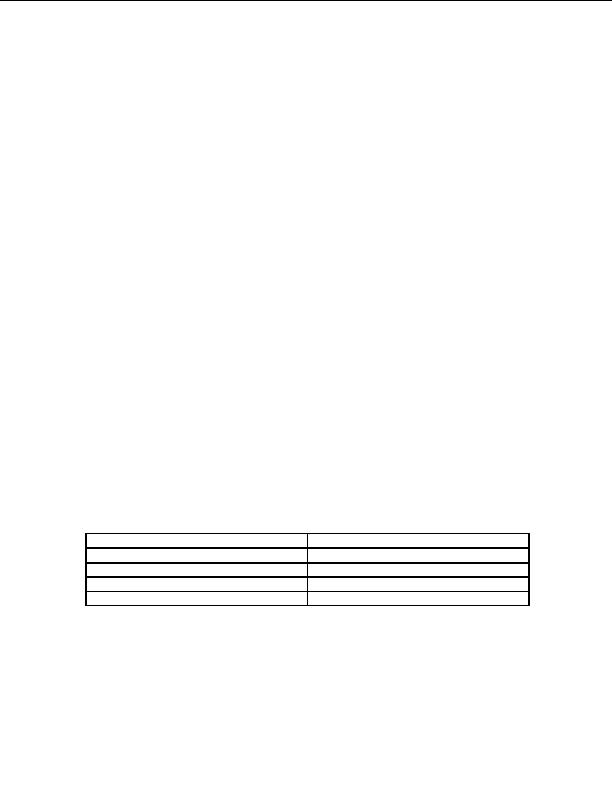
The following table lists the number of steps per second (sidereal tracking) for several
mounts:
Worm Period
Steps per second
4 min. (G 11, HGM 200, MI 250)
26.737
5.33 min. (HGM Titan)
20.055
8 min. (GM 8, CI 700)
13.367
5.33 min. (Titan 50)
40.11
Gemini Users Manual
3
9
footer
Our partners:
PHP: Hypertext Preprocessor Cheap Web Hosting
JSP Web Hosting
Ontario Web Hosting
Jsp Web Hosting
Cheapest Web Hosting
Java Hosting
Cheapest Hosting
Visionwebhosting.net Business web hosting division of Vision Web Hosting Inc.. All rights reserved